
Visual SLAM
发布时间:2018-05-21 栏目:机器视觉 评论:0 Comments
- DSO
- LSD-SLAM
2014年一个半稠密SLAM系统
LSD-SLAM (Large-Scale Direct Monocular SLAM) 的主页:http://vision.in.tum.de/research/vslam/lsdslam
Github网址:https://github.com/tum-vision/lsd_slam
- ORB-SLAM: 2015年一个比较完整的基于特征点的SLAM系统
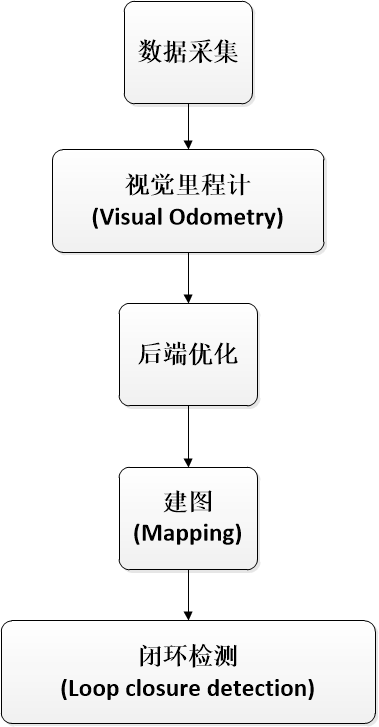
视觉SLAM主要分为几个模块:数据采集、视觉里程计(Visual Odometry)、后端优化、建图(Mapping)、闭环检测(Loop closure detection)。如下图所示:
视觉里程计
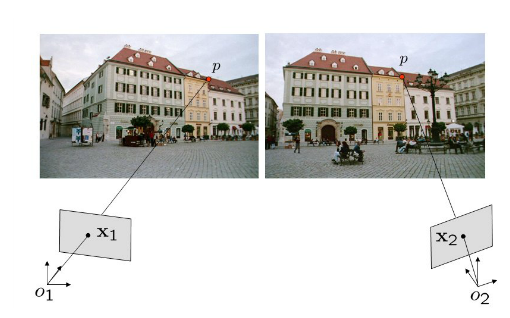
视觉里程计就是利用一个图像序列或者一个视频流,计算摄像机的方向和位置的过程。一般包括图像获取后、畸变校正、特征检测匹配或者直接匹配对应像素、通过对极几何原理估计相机的旋转矩阵和平移向量。
后端优化
后端优化理论上来说,如果视觉里程计模块估计的相机的旋转矩阵R和平移向量t都正确的话,我们就能得到完美的定位和建图了。但实际试验中,我们得到的数据往往有很多噪声,且由于传感器的精度、错误的匹配等,都对造成结果有误差。并且由于我们是只把新的一帧与前一个关键帧进行比较,当某一帧的结果有误差时,就会对后面的结果产生累计误差,最后的结果肯定误差越来越大。为了解决这个问题,引入后端优化。
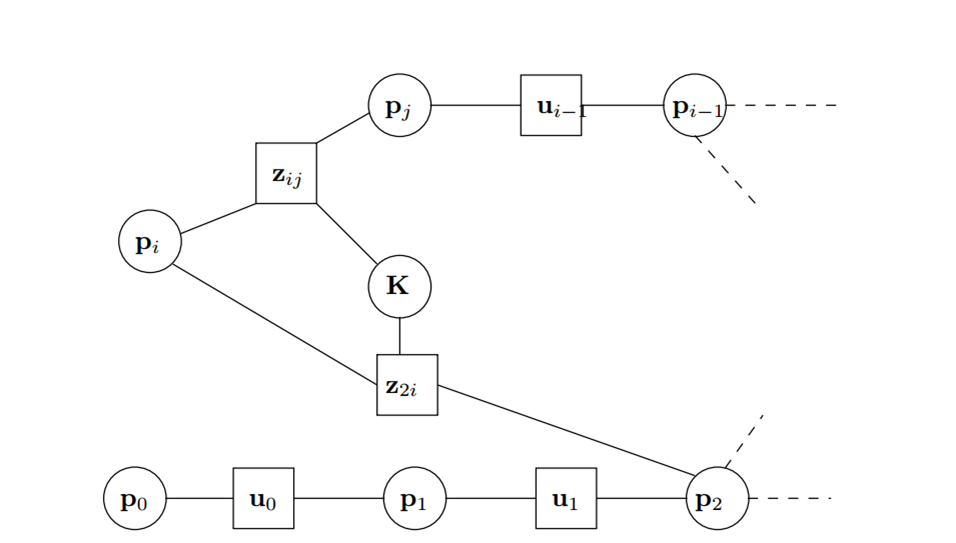
后端优化一般采用捆集调整(BA)、卡尔曼滤波(EKF)、图优化等方式来解决。其中基于图优化的后端优化,效果最好。Graph-based SLAM一般使用g2o求解器,进行图优化计算。
闭环检测
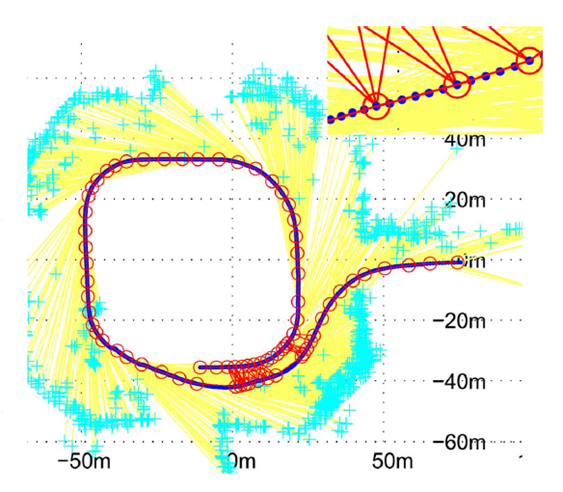
后端优化可能得到一个比较优的解,但当运动回到某一个之前去过的地方,如果我们能认出这个地方,并找到那个时候的关键帧进行比较,我们就可以得到比单用后端优化更准确更高效的结果。闭环检测就是要解决这个问题。
闭环检测有两种方式,一是根据估计出来的相机的位置,看是否与之前否个位置邻近;另外一种是根据图像,去自动识别出来这个场景之前到过,并找到那时候的关键帧。现在比较常用的是后一种方法,其实是一个非监督的模式识别问题。比较常用的方法是使用Bag-of-Words(BOW),ORB-SLAM就是使用这个方法来进行闭环检测。

留下评论
You must be logged in to post a comment.





